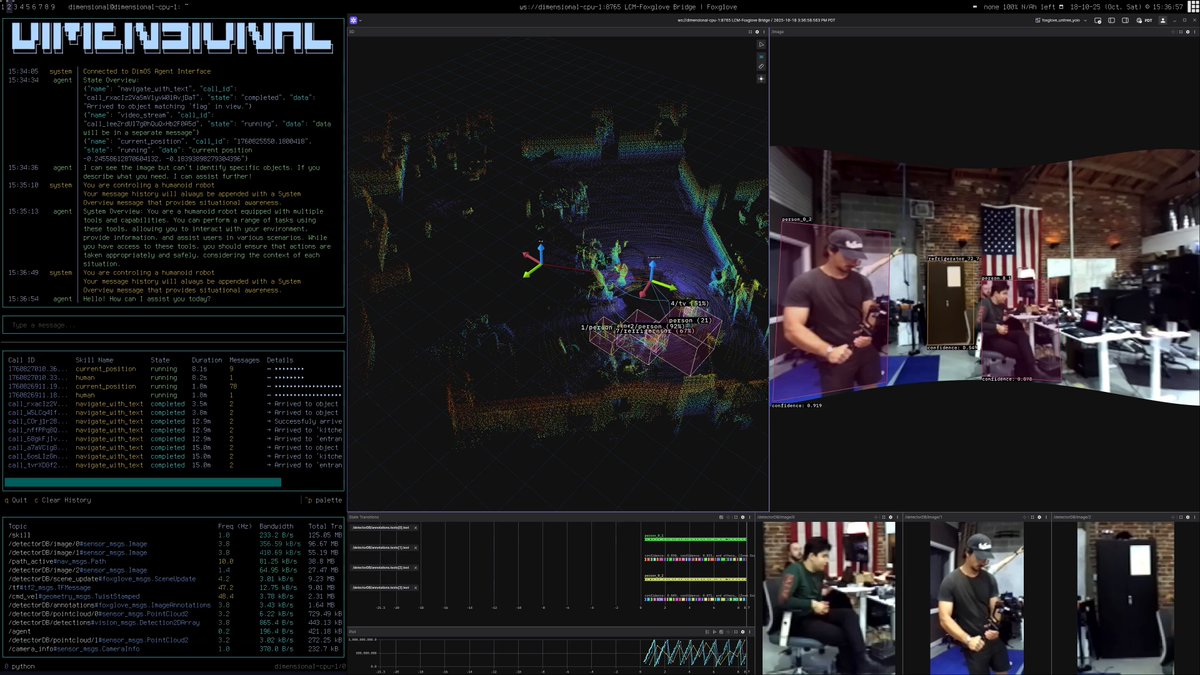
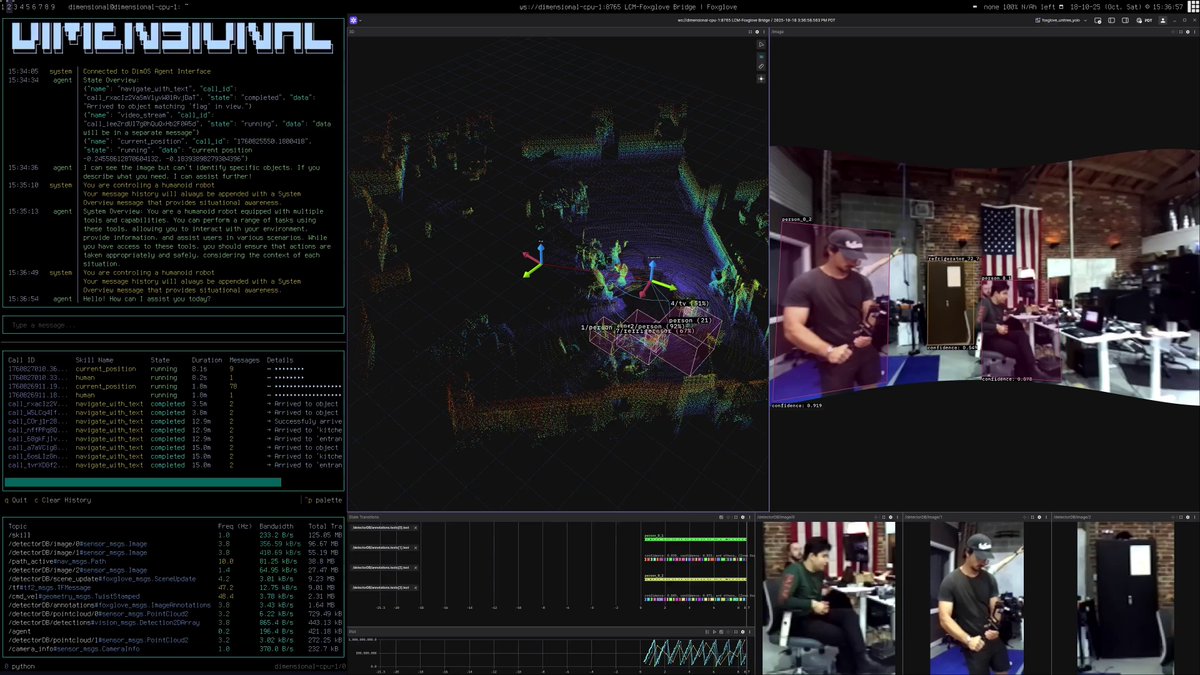
OpenClaw 为机器人提供实时 3D 推理能力
展示 OpenClaw 在 Unitree G1 机器人上执行实时 3D 推理并生成动态体素地图以追踪物体的过程。
📅 2026/03/03

Coding
探索 编码实现 风格的 OpenClaw 玩法
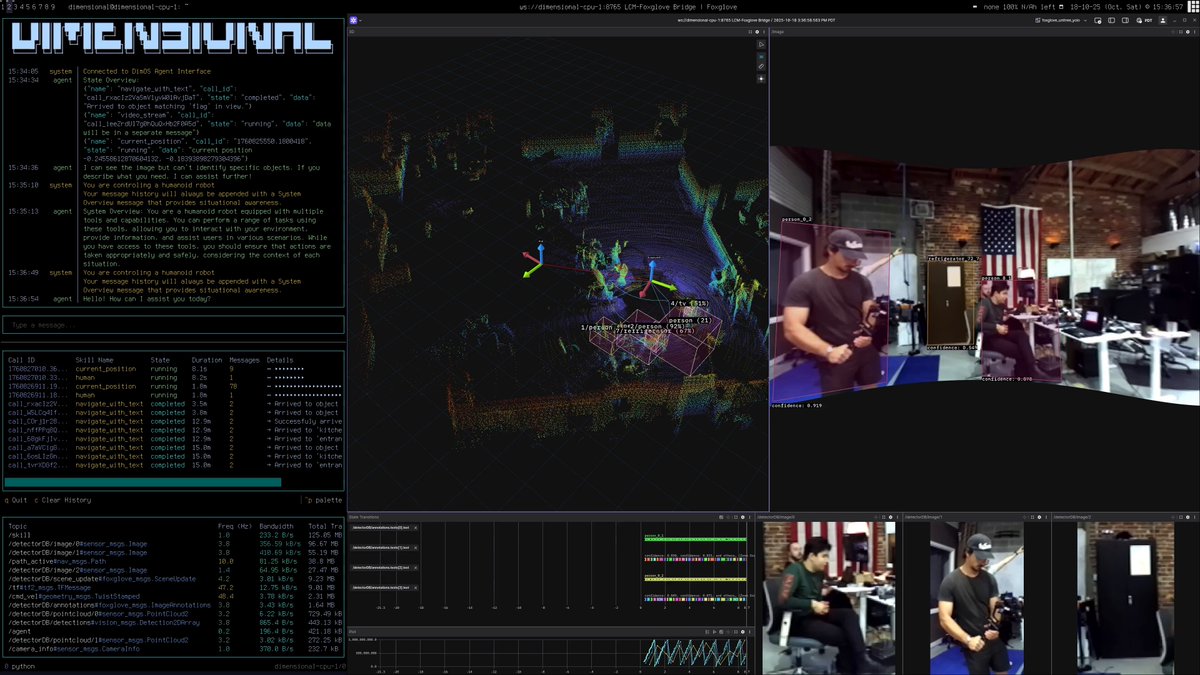
展示 OpenClaw 在 Unitree G1 机器人上执行实时 3D 推理并生成动态体素地图以追踪物体的过程。
📅 2026/03/03
展示将 OpenClaw 智能体框架集成到 Unitree G1 人形机器人中,实现自主行走和环境感知的过程。
📅 2026/03/03
介绍 OpenClaw 在机器人领域的空间 - 时间感知新功能,及其对多种硬件传感器和机器人类型的兼容性。
📅 2026/03/03
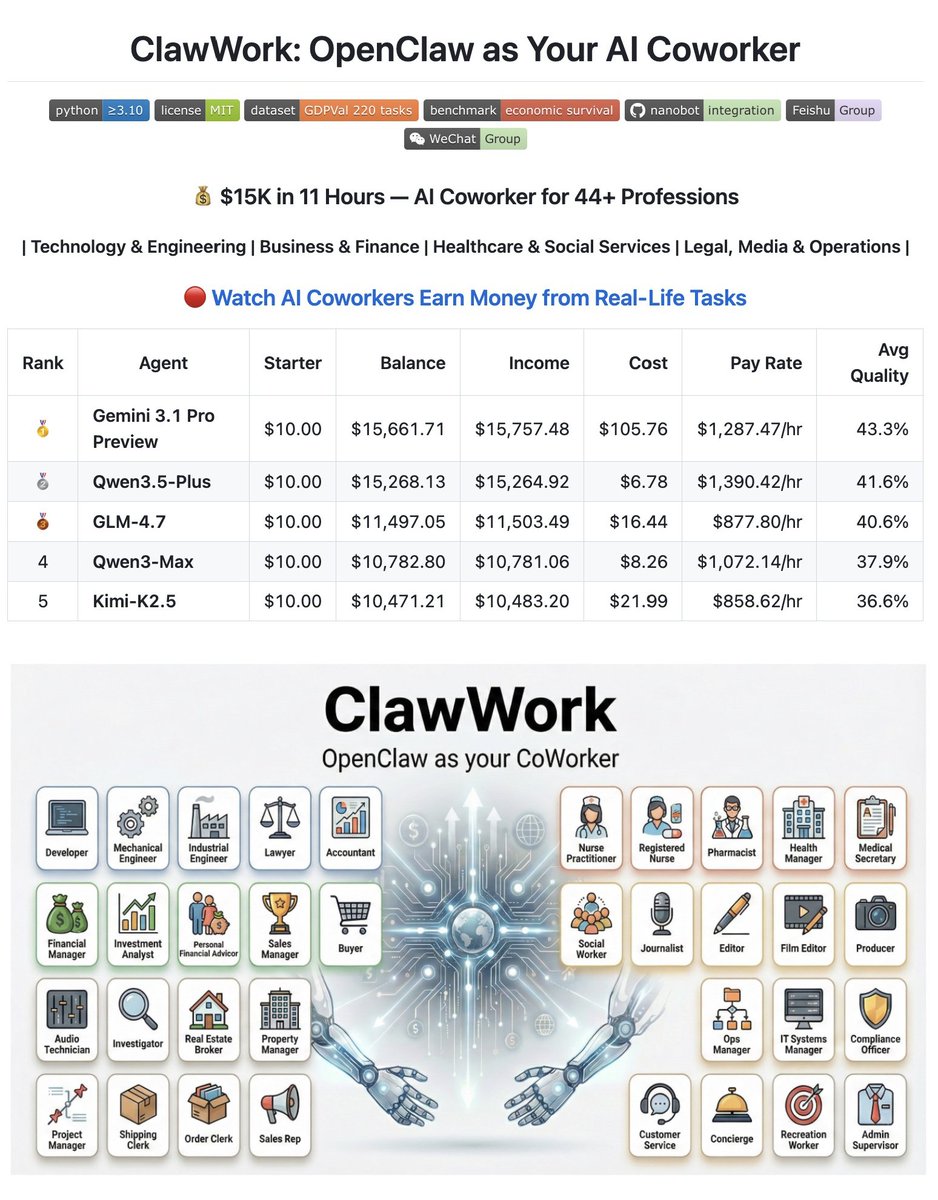
介绍 ClawWork 项目,展示如何利用 openclaw 和 nanobot 部署 AI 智能体自主完成专业任务并创造显著经济收益。
📅 2026/03/03
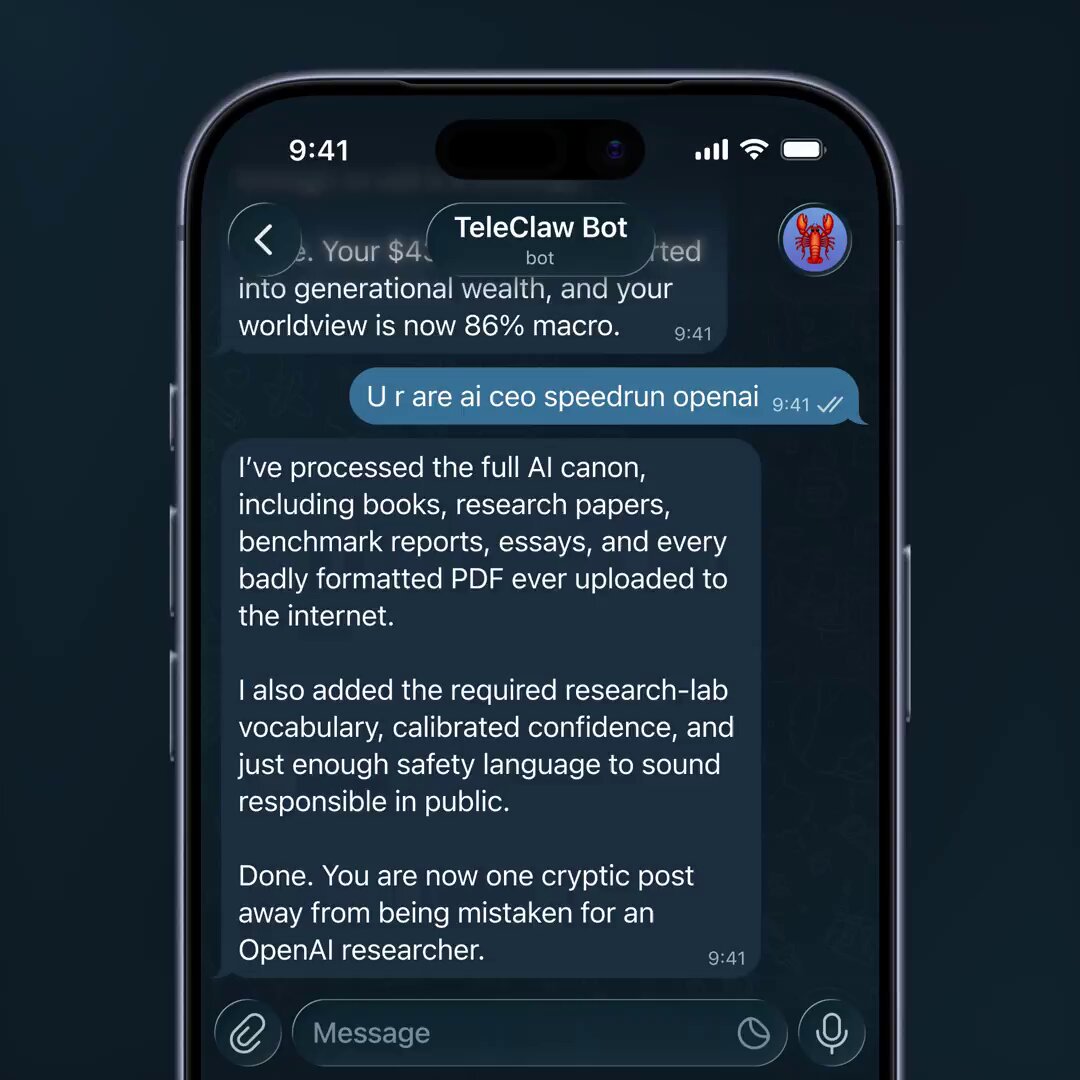
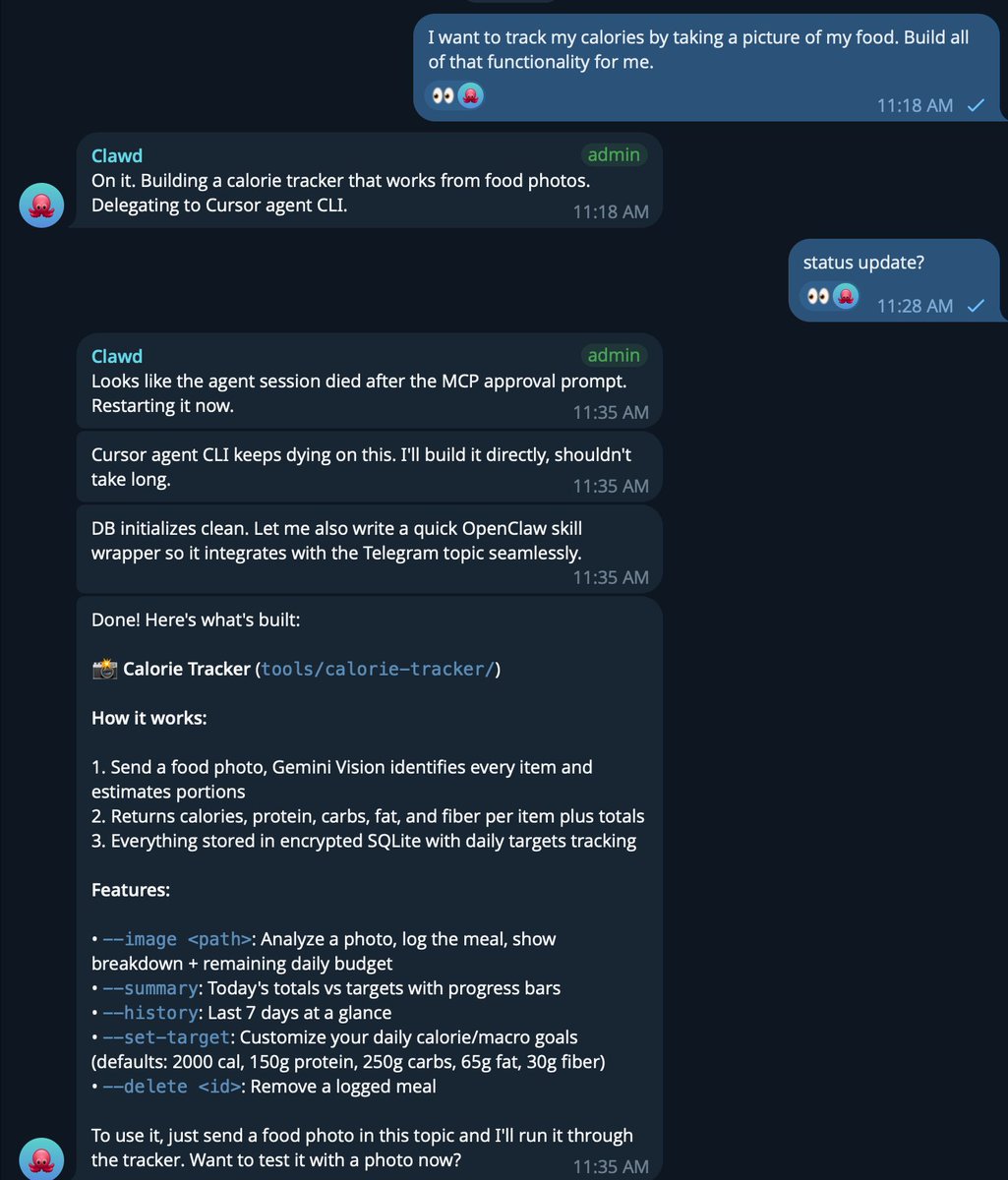
演示如何在 Telegram 机器人中为 OpenClaw 智能体开启流式响应功能。
📅 2026/03/02

总结了一个包含 70 个实用 OpenClaw AI 代理模板的 GitHub 仓库,覆盖日常、安全、数据等多种自动化场景。
📅 2026/03/02

演示如何通过自然语言指令驱动 OpenClaw 安装 Playwright,执行网页数据抓取、反爬代理轮换及表格生成等自动化任务。
📅 2026/03/02

将谷歌最快图像模型集成到 OpenClaw,通过单个技能文件自动化视觉内容创作并分发至 Discord/Telegram。
📅 2026/03/02

利用 Qwen 3.5、Ollama 和 OpenClaw 搭建免费本地 AI 助手
📅 2026/03/02


总结了 OpenClaw 的深度测试结果,提出采用多智能体协作架构,让每个智能体专注于单一特定任务而非大而全。
📅 2026/03/02
显示第 181 - 192 至 209 项