OpenClaw: Open-Source Robotics Platform for Unitree G1
Coding📅 2026/03/03

#Demo#Developer#Discord#GitHub#Low Risk#Semi-Automatic#代码仓库#报告
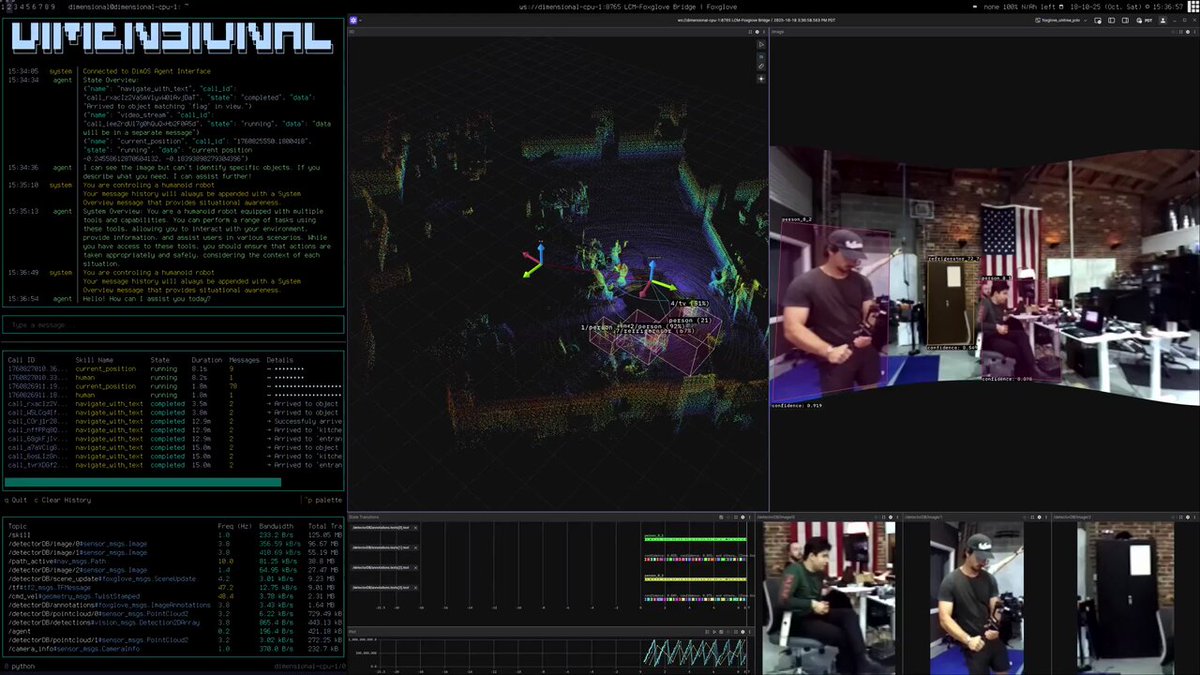
OpenClaw on a Unitree G1 humanoid 🤯 A MIT dropout developed an open-source robotics platform that supports 80% of Chinese OEM robots! This OpenClaw upgrade to process physical space and time via integrations with LiDAR, stereo, or RGB cameras. It enables robots like the Unitree G1 to build voxel-based world models for queries on object locations, visitor tracking, or routines, as shown the demo video of real-time 3D mapping and navigation. All credits go to @stash_pomichter and team @dimensionalos! ❗️Join their discord if you want to build sentient robots: https://t.co/qRu7M6ahG3 —— Weekly robotics and AI insights. Subscribe free: https://t.co/9Nm01QUcw3